
~自動収穫ロボットの“回り込み角度推定”をAPI化し、Azure Functions経由で動作連携まで確認~
AIとロボットを活用したスマート農業を提供するAGRIST株式会社(本社:宮崎県新富町、以下、AGRIST)は、企業や組織のイノベーションを創出する「Microsoft AI Co-Innovation Lab KOBE」(以下、AI Co-Innovation Lab)にて、生成AIを用いたフィジカルAI(AIの判断をロボット動作へ接続する仕組み)の開発検証を実施しました。

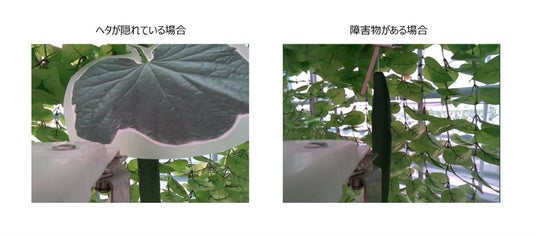
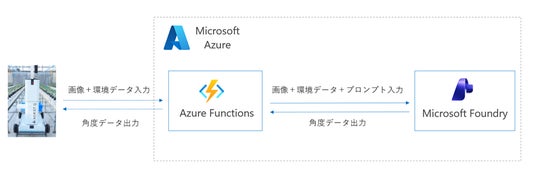
本開発検証では、収穫時に「ヘタが隠れている」「障害物がある」などの実環境要因により、自動収穫ロボットのロボットアームが対象へ適切にアプローチできないケースに着目しました。画像(RGB/Depth等)を入力として“回り込みの推奨角度”を生成AIが算出し、Azure Functionsを介して自動収穫ロボットから呼び出し可能なAPIとして提供することで、ロボット動作へつなぐ一連のフローを確認しました。
今回の取り組みにより、将来的に収穫の成功率(収穫性能)を大きく高め得るアプローチとして、フィジカルAIの有効性と今後の拡張性に関する手応えを得ています。
背景
AGRISTはこれまで、自動収穫ロボットの現場課題を起点に、AIによる認識・予測の高度化と、現場運用に耐えるシステム化を進めてきました。
自動収穫ロボットにおいては、対象物の位置や角度だけでなく、葉・茎・支柱など周辺環境によってロボットアームの進入経路が制限されることがあり、結果として収穫動作の失敗や時間ロスにつながるケースがあります。こうした現場要因は多様で、ルールベースのみでの網羅が難しい領域です。
そこで今回、AIの推論結果を“自動収穫ロボットが実際に動ける指示”へ変換し、環境変化にも追随しやすい形で提供する「フィジカルAI」により、収穫性能向上に向けた開発検証を行いました。
今回の開発検証で取り組んだこと(Sprint:5日間)
本Sprintは、主に以下のWorkstreamで構成しました。
1)課題設定
・ヘタ隠れ/障害物あり等により、ロボットアームが対象へ取りに行けない(適切な進入角度が取れない)状況が発生
2)目標
・自動収穫ロボットがAzure Functionsを呼び出し、推奨角度(回り込み角度)をJSON形式で受け取り、動作へ反映できることを確認
3)実施内容
・Microsoft Foundry(Foundry Models)上で生成AIの推論エンドポイントを構築
・RGB/Depth等の入力データを前処理し、推論に適した形へ整形
・出力を自動収穫ロボット側で扱いやすいJSON形式に固定(レスポンスフォーマット指定)
・2ケース(ヘタ隠れ/障害物あり)を想定したAzure Functionsを構築・デプロイ
・自動収穫ロボットがAzure Functionsを起動し、返却された角度を動作へ反映するところまで確認
主な成果
・生成AI→角度データ→ロボット動作の一連フローを、Azure Functionsを介して疎結合に実装し、接続・動作連携を確認
・推論はノートブック検証で、概ね10~30秒程度でレスポンスが返る感触を得た
・“分かりやすい入力(画像・前処理)”では一定の精度感が得られ、入力設計や前処理の工夫が精度向上に効く手応えを確認
※上記はSprint期間中の試作・検証時点の所感であり、今後、実環境データの蓄積と評価設計により精度・再現性を高めていきます。
AGRISTコメント
執行役員CTO 兼 VPoE 清水秀樹
今回のSprintでは、生成AIの推論結果を“自動収穫ロボットが動ける指示(角度データ)”として返すところまでを、Azure Functionsを介したAPIとして組み上げ、動作連携まで確認できました。これはフィジカルAIを現場に実装するうえでの大きな前進です。
特に、画像(RGB/Depth等)から状況を解釈し、回り込み角度という形で具体的な行動指示に落とし込める手応えが得られました。データの蓄積と入力設計・前処理、評価方法の整備を進めれば、今後1~2年で実用水準に近づけられる可能性を強く感じています。AGRISTとしても、この領域は収穫性能を大きく引き上げ得る中核技術だと捉えており、開発にさらに力を入れていきます。
ロボット開発責任者 増渕武
フィジカルAIは現在急速に発展しており、実運用へ向けて技術を検証することは非常に重要だと考えています。今回、自動収穫ロボット上での動作確認まで到達できたことで、さらなる機能拡張や精度向上に大きな可能性を感じました。短期間で実装するためにご協力頂いたAI Co-Innovation Labの関係者の皆様には深く感謝しています。今後は実環境でのデータ取得と検証を重ね、収穫性能の向上につながる機能開発を加速させていきます。
マイクロソフトエンジニアコメント
Lab Engineer 束田氏より

このたびは、非常に実り多いスプリントをご一緒させていただき、誠にありがとうございました。
本スプリントでは、模擬環境をご用意いただいた上で、ロボット撮影画像の前処理から生成AIによる角度推論までを一連のパイプラインとして設計・実装し、さらにAGRIST様ロボットを用いて障害物回避から収穫地点への移動まで実機で確認できました。
野菜の生育状況が多様であることは、収穫率向上に向けた大きな課題の一つであると認識しております。こうした環境変化に柔軟に対応可能なフィジカル AI の取り組みには大きな可能性を感じており、今回のスプリントを通じてその実現性と今後の発展の余地を改めて実感いたしました。
今後、実環境でのデータ蓄積や評価設計が進むことで、収穫性能向上に直結するフィジカル AI へとさらなる発展を期待しております。今後の開発においても、また機会を頂戴できました際には、AI Co-Innovation Lab が引き続き伴走できましたら幸いです。
Digital Native Scaling Team Yusuke Satake氏 ・ Bassam氏より
このたびは、本スプリントをご一緒させていただき、誠にありがとうございました。
今回のテーマである フィジカル AI × 農業 は、まさに AGRIST 様が長年取り組まれてきた現場課題への深い理解と革新的アプローチが結びついた領域であり、今回の検証はその可能性を大きく広げる第一歩になったと感じています。
今回のプロトタイプでは、LLM が実際の環境を理解し、ロボットの動作につながる「回り込み角度」を出力することで、収穫動作の成功率を高める新たなアプローチを示されました。これは、フィジカルAIが農業現場において実際に価値を生み出せることを示す非常に意義ある成果だと思います。
また、Microsoft Foundry Models を活用した推論パイプラインの構築や、Azure Functions を介したロボット連携まで短期間で実現されたことは、AGRIST 様の技術力と実行力の強さを改めて実感するものでした。
私たち Digital Native Scaling Team は、AGRIST 様が生み出す新しい農業の未来に引き続き伴走できることを大変嬉しく思っております。
今回のプロトタイプが切り開いた可能性が、今後さらに発展し、農業の現場に大きなインパクトをもたらすことを心から楽しみにしています。
今後の展望
今回の検証を踏まえ、今後は以下に取り組み、実環境での精度・再現性・運用性を高めていきます。
・運用・権限・構成の棚卸しなどのAzure環境の整理
・ログ/画像を中心としたデータ基盤の設計・実装
・収穫成果(ロボットの成果指標)とAI精度の評価方法の設計
・入力設計、前処理、プロンプト改善 等リアルデータを用いた精度向上これらを段階的に進めることで、自動収穫ロボットの収穫成功率向上と処理時間短縮につながるフィジカルAIの社会実装を目指します。
■参考:これまでのマイクロソフト社との取り組み
AGRISTはAI Co-Innovation Lab KOBEでのSprint開発支援を活用しながら、農業現場で価値を出すAI活用に取り組んできました。今後もマイクロソフト社との協働を強化し、AIと自動収穫ロボットを組み合わせたスマート農業の社会実装を推進してまいります。
________________________________________
※Microsoft、Azureは、米国Microsoft Corporationの米国およびその他の国における登録商標または商標です。
 AGRIST株式会社
AGRIST株式会社
AGRISTは、テクノロジーで農業課題を解決し、100年先も続く持続可能な農業を実現するスタートアップ企業です。 AIを搭載した自動収穫ロボットを活用したスマート農業を全国で展開しております。 本社は、国の地方創生優良事例にも選出された農業が盛んな宮崎県新富町です。 2025年までに農林水産大臣賞を含む国内外で27個以上の賞を受賞しました。
媒体資料:https://agrist.com/media
AGRISTでは、AI農業プラットフォーム「AGRIST Ai」の構築を行うエンジニア、ロボット開発エンジニア、次世代農場の栽培および農業技術の研究開発を行う農場スタッフの採用を強化しています。詳しくは下記の採用サイトをご覧ください。
採用サイト:https://agrist.com/recruit
代表者:斎藤潤一、秦裕貴
本社所在地:宮崎県児湯郡新富町富田東1-47-1
設立:2019年10月
事業内容:AIとロボットを活用したスマート農業
AIとロボットを活用したスマート農業を提供するAGRIST株式会社(本社:宮崎県新富町、以下、AGRIST)は、企業や組織のイノベーションを創出する「Microsoft AI Co-Innovation Lab KOBE」(以下、AI Co-Innovation Lab)にて、生成AIを用いたフィジカルAI(AIの判断をロボット動作へ接続する仕組み)の開発検証を実施しました。
本開発検証では、収穫時に「ヘタが隠れている」「障害物がある」などの実環境要因により、自動収穫ロボットのロボットアームが対象へ適切にアプローチできないケースに着目しました。画像(RGB/Depth等)を入力として“回り込みの推奨角度”を生成AIが算出し、Azure Functionsを介して自動収穫ロボットから呼び出し可能なAPIとして提供することで、ロボット動作へつなぐ一連のフローを確認しました。
今回の取り組みにより、将来的に収穫の成功率(収穫性能)を大きく高め得るアプローチとして、フィジカルAIの有効性と今後の拡張性に関する手応えを得ています。
背景
AGRISTはこれまで、自動収穫ロボットの現場課題を起点に、AIによる認識・予測の高度化と、現場運用に耐えるシステム化を進めてきました。
自動収穫ロボットにおいては、対象物の位置や角度だけでなく、葉・茎・支柱など周辺環境によってロボットアームの進入経路が制限されることがあり、結果として収穫動作の失敗や時間ロスにつながるケースがあります。こうした現場要因は多様で、ルールベースのみでの網羅が難しい領域です。
そこで今回、AIの推論結果を“自動収穫ロボットが実際に動ける指示”へ変換し、環境変化にも追随しやすい形で提供する「フィジカルAI」により、収穫性能向上に向けた開発検証を行いました。
今回の開発検証で取り組んだこと(Sprint:5日間)
本Sprintは、主に以下のWorkstreamで構成しました。
1)課題設定
・ヘタ隠れ/障害物あり等により、ロボットアームが対象へ取りに行けない(適切な進入角度が取れない)状況が発生
2)目標
・自動収穫ロボットがAzure Functionsを呼び出し、推奨角度(回り込み角度)をJSON形式で受け取り、動作へ反映できることを確認
3)実施内容
・Microsoft Foundry(Foundry Models)上で生成AIの推論エンドポイントを構築
・RGB/Depth等の入力データを前処理し、推論に適した形へ整形
・出力を自動収穫ロボット側で扱いやすいJSON形式に固定(レスポンスフォーマット指定)
・2ケース(ヘタ隠れ/障害物あり)を想定したAzure Functionsを構築・デプロイ
・自動収穫ロボットがAzure Functionsを起動し、返却された角度を動作へ反映するところまで確認
主な成果
・生成AI→角度データ→ロボット動作の一連フローを、Azure Functionsを介して疎結合に実装し、接続・動作連携を確認
・推論はノートブック検証で、概ね10~30秒程度でレスポンスが返る感触を得た
・“分かりやすい入力(画像・前処理)”では一定の精度感が得られ、入力設計や前処理の工夫が精度向上に効く手応えを確認
※上記はSprint期間中の試作・検証時点の所感であり、今後、実環境データの蓄積と評価設計により精度・再現性を高めていきます。
AGRISTコメント
執行役員CTO 兼 VPoE 清水秀樹
今回のSprintでは、生成AIの推論結果を“自動収穫ロボットが動ける指示(角度データ)”として返すところまでを、Azure Functionsを介したAPIとして組み上げ、動作連携まで確認できました。これはフィジカルAIを現場に実装するうえでの大きな前進です。
特に、画像(RGB/Depth等)から状況を解釈し、回り込み角度という形で具体的な行動指示に落とし込める手応えが得られました。データの蓄積と入力設計・前処理、評価方法の整備を進めれば、今後1~2年で実用水準に近づけられる可能性を強く感じています。AGRISTとしても、この領域は収穫性能を大きく引き上げ得る中核技術だと捉えており、開発にさらに力を入れていきます。
ロボット開発責任者 増渕武
フィジカルAIは現在急速に発展しており、実運用へ向けて技術を検証することは非常に重要だと考えています。今回、自動収穫ロボット上での動作確認まで到達できたことで、さらなる機能拡張や精度向上に大きな可能性を感じました。短期間で実装するためにご協力頂いたAI Co-Innovation Labの関係者の皆様には深く感謝しています。今後は実環境でのデータ取得と検証を重ね、収穫性能の向上につながる機能開発を加速させていきます。
マイクロソフトエンジニアコメント
Lab Engineer 束田氏より
このたびは、非常に実り多いスプリントをご一緒させていただき、誠にありがとうございました。
本スプリントでは、模擬環境をご用意いただいた上で、ロボット撮影画像の前処理から生成AIによる角度推論までを一連のパイプラインとして設計・実装し、さらにAGRIST様ロボットを用いて障害物回避から収穫地点への移動まで実機で確認できました。
野菜の生育状況が多様であることは、収穫率向上に向けた大きな課題の一つであると認識しております。こうした環境変化に柔軟に対応可能なフィジカル AI の取り組みには大きな可能性を感じており、今回のスプリントを通じてその実現性と今後の発展の余地を改めて実感いたしました。
今後、実環境でのデータ蓄積や評価設計が進むことで、収穫性能向上に直結するフィジカル AI へとさらなる発展を期待しております。今後の開発においても、また機会を頂戴できました際には、AI Co-Innovation Lab が引き続き伴走できましたら幸いです。
Digital Native Scaling Team Yusuke Satake氏 ・ Bassam氏より
このたびは、本スプリントをご一緒させていただき、誠にありがとうございました。
今回のテーマである フィジカル AI × 農業 は、まさに AGRIST 様が長年取り組まれてきた現場課題への深い理解と革新的アプローチが結びついた領域であり、今回の検証はその可能性を大きく広げる第一歩になったと感じています。
今回のプロトタイプでは、LLM が実際の環境を理解し、ロボットの動作につながる「回り込み角度」を出力することで、収穫動作の成功率を高める新たなアプローチを示されました。これは、フィジカルAIが農業現場において実際に価値を生み出せることを示す非常に意義ある成果だと思います。
また、Microsoft Foundry Models を活用した推論パイプラインの構築や、Azure Functions を介したロボット連携まで短期間で実現されたことは、AGRIST 様の技術力と実行力の強さを改めて実感するものでした。
私たち Digital Native Scaling Team は、AGRIST 様が生み出す新しい農業の未来に引き続き伴走できることを大変嬉しく思っております。
今回のプロトタイプが切り開いた可能性が、今後さらに発展し、農業の現場に大きなインパクトをもたらすことを心から楽しみにしています。
今後の展望
今回の検証を踏まえ、今後は以下に取り組み、実環境での精度・再現性・運用性を高めていきます。
・運用・権限・構成の棚卸しなどのAzure環境の整理
・ログ/画像を中心としたデータ基盤の設計・実装
・収穫成果(ロボットの成果指標)とAI精度の評価方法の設計
・入力設計、前処理、プロンプト改善 等リアルデータを用いた精度向上これらを段階的に進めることで、自動収穫ロボットの収穫成功率向上と処理時間短縮につながるフィジカルAIの社会実装を目指します。
■参考:これまでのマイクロソフト社との取り組み
AGRISTはAI Co-Innovation Lab KOBEでのSprint開発支援を活用しながら、農業現場で価値を出すAI活用に取り組んできました。今後もマイクロソフト社との協働を強化し、AIと自動収穫ロボットを組み合わせたスマート農業の社会実装を推進してまいります。
________________________________________
※Microsoft、Azureは、米国Microsoft Corporationの米国およびその他の国における登録商標または商標です。
AGRIST株式会社AGRISTは、テクノロジーで農業課題を解決し、100年先も続く持続可能な農業を実現するスタートアップ企業です。 AIを搭載した自動収穫ロボットを活用したスマート農業を全国で展開しております。 本社は、国の地方創生優良事例にも選出された農業が盛んな宮崎県新富町です。 2025年までに農林水産大臣賞を含む国内外で27個以上の賞を受賞しました。
媒体資料:https://agrist.com/media
AGRISTでは、AI農業プラットフォーム「AGRIST Ai」の構築を行うエンジニア、ロボット開発エンジニア、次世代農場の栽培および農業技術の研究開発を行う農場スタッフの採用を強化しています。詳しくは下記の採用サイトをご覧ください。
採用サイト:https://agrist.com/recruit
代表者:斎藤潤一、秦裕貴
本社所在地:宮崎県児湯郡新富町富田東1-47-1
設立:2019年10月
事業内容:AIとロボットを活用したスマート農業